Program Overview
The detailed ICRA 2024 program can be found through the PaperPraza, which is now available in the following link:
https://ras.papercept.net/conferences/conferences/ICRA24/program
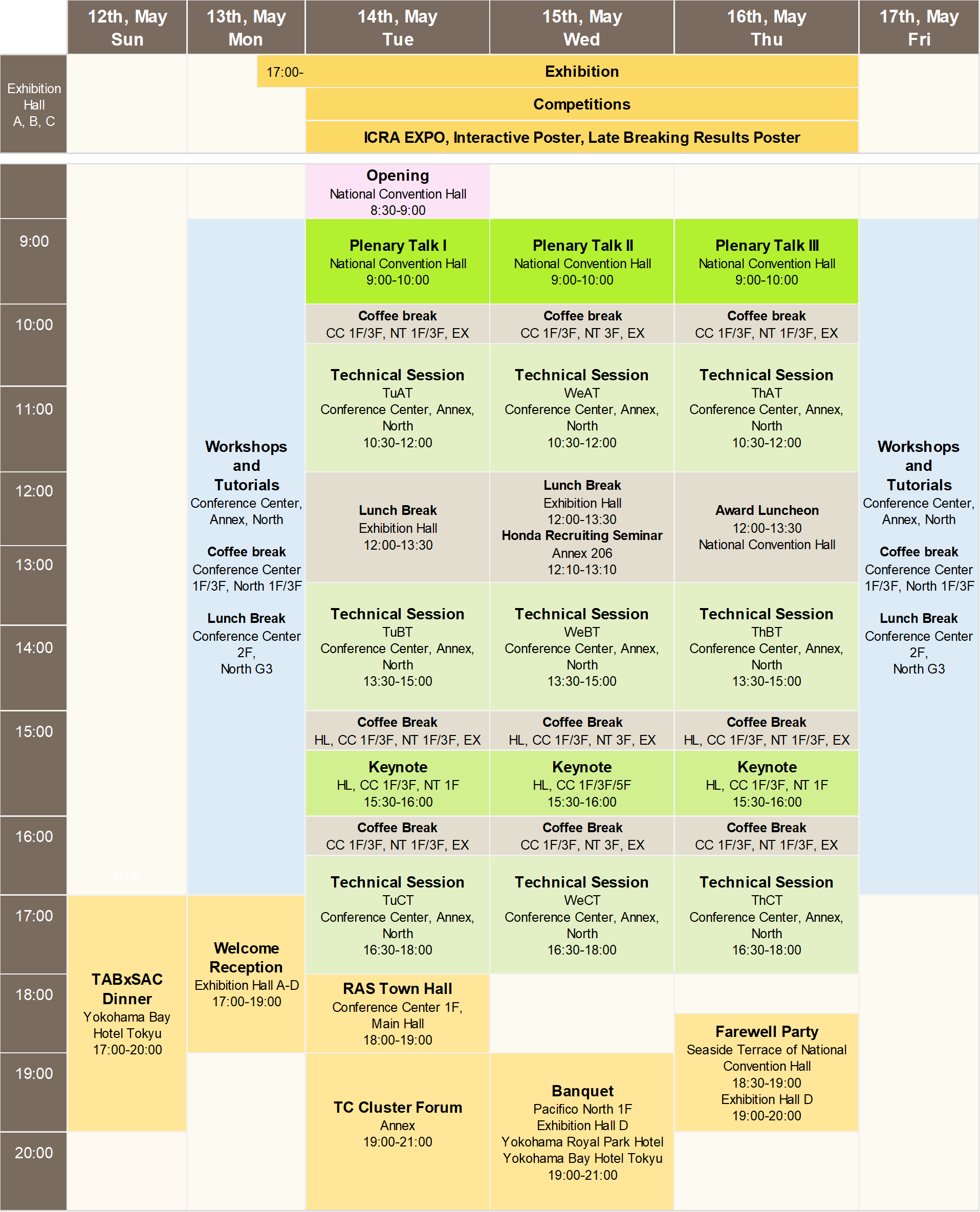
Program at a glance
Program is tentative and may subject to change.
Plenary Talks

May 14th 9:00-10:00, National Convention Hall
Dr. Yoky Matsuoka
Managing Executive Officer of Panasonic Holdings, CEO of PanasonicWELL, and Founder & CEO of Yohana
How to Turn a Roboticist into a Corporate Explorer
In recent decades, the robotics industry has undergone a remarkable transformation. Technological advancements and robotics researchers embracing entrepreneurship have led to an increase in funding for robotics companies and an overall growth of companies producing significant revenue. It’s an exciting time to be in the field of robotics! In this talk, we will discuss various ways to innovate and create a meaningful business in the current global market. Specifically, I will introduce the concept of the corporate explorer and talk about a non-traditional path to innovation, incubation, and creating a massive impact.
May 15th 9:00-10:00, National Convention Hall
Prof. Sami Haddadin
Robotics and Systems Intelligence, Technical University of Munich (TUM)
The Great Robot Accelerator: Collective Learning of Optimal Embodied AI
Robots have achieved unprecedented performance jumps over the last decade. As of today, however, robot design and build are laborious and suboptimal, costly and constitute a major limitation in achieving the anticipated robotics revolution. At the same time, we see intelligent machines that learn and perform tasks, and are able to generalize their skills to new contexts. However, robot learning faces seemingly unsolvable hurdles such as disembodied machine learning not being able to leverage our understanding of the physical reality, finding energy and time efficient solutions, or generalize to complex and dynamic manipulation skills. In this talk I will discuss the autonomous Co-Evolution of Embodiment and Intelligence as the central challenge of robotics. Only, when robots will evolve in an AI-propelled highly evolutionary process, we can finally reach the tipping point and automatically synthesize general purpose robots. I will introduce the concepts of Collective Learning and Optimal Embodied AI as two main pillars vital to this transformation towards an AI-Accelerated Robot Evolution.

May 16th 9:00-10:00, National Convention Hall
Prof. Sunil K Agrawal
Professor of Mechanical Engineering and Rehabilitation Medicine, Columbia University
Rehabilitation Robotics: How to Improve Daily Functions in People with Impairments?
Neural disorders, old age, and traumatic brain injuries limit activities of daily living. Robotics can be used in novel ways to characterize human neuromuscular responses and retrain human functions. Columbia University Robotics and Rehabilitation (ROAR) Laboratory designs innovative robots with these goals and performs scientific studies to improve human functions such as standing, walking, stairclimbing, trunk control, head turning, and others. Human experiments have targeted individuals with stroke, cerebral palsy, Parkinson’s disease, ALS, and elderly subjects. The talk will provide an overview of these robotic technologies and scientific studies performed with them to demonstrate strong potential of rehabilitation robotics to improve human functions and quality of life of people around the world.
Keynote Talks
May 14th 15:30-16:00
| Name | Affiliation | Talk Title |
|---|---|---|
| Prof. Lianqing Liu | Shenyang Institute of Automation, Chinese Academy of Sciences, China | Biosyncretic sensing, actuation and intelligence for robotics |
| Prof. Dawn M. Tilbury | University of Michigan, USA | Digital Twins for Manufacturing Automation |
| Dr. Claudio Pacchierotti | CNRS, Univ Rennes, Inria, IRISA, France | Beyond Force Feedback: Cutaneous Haptics in Human-centered Robotics |
| Prof. Yu Sun | Robotics Institute, University of Toronto | Medical Robotics for Cell Surgery – Science and Applications |
| Prof. Yasuhisa Hirata | Tohoku University, Japan | Adaptable AI-enabled Robots to Create a Vibrant Society – Moonshot R&D Projects in Japan – |
May 15th 15:30-16:00
| Name | Affiliation | Talk Title |
|---|---|---|
| Prof. Calin Belta | University of Maryland, College Park, USA | Formal Methods for Safety-Critical Control |
| Dr. Manuel Catalano | Fondazione Istituto Italiano di Tecnologia, Research Line Soft Robotics for Human Cooperation and Rehabilitation | Robots in the Wild: From Research Labs to the Real World |
| Prof. Harold Soh | National University of Singapore (NUS) and Smart Systems Institute (SSI), Singapore | Building Guidance Bridges with Generative Models for Robot Learning and Control |
| Prof. Lorenzo Sabattini | University of Modena and Reggio Emilia | Unleashing the power of many: decentralized control of multi-robot systems |
| Prof. Myunghee Kim | Mechanical & Industrial Engineering, University of Illinois at Chicago | Human-wearable robot co-adaptation |
May 16th 15:30-16:00
| Name | Affiliation | Talk Title |
|---|---|---|
| Prof. Yoko Yamanishi | Kyushu University, Japan | Emergent Functions of Electrically-induced Bubbles and Intra-cellular-CA(Cybernetic Avatar) |
| Prof. Kensuke Harada | Osaka Univ. Japan | Robotic manipulation aiming for industrial applications |
| Prof. Iolanda Leite | KTH Royal Institute of Technology, Sweden | The Quest for Social Robot Autonomy |
| Prof. Rong Xiong | Zhejiang University, China | Integration of Robotics and AI: Changes and Challenges |
| Prof. Mariana Medina-Sánchez | Ikerbasque – NanoGUNE, Spain | Tiny Robots, Big Impact: Transforming Gynecological Care |
Workshops/Tutorials
Workshops
Monday 13th May 2024
| The robotics, psychology and neuroscience of body augmentation | https://www.imperial.ac.uk/human-robotics/icra-2024-workshop/ |
| Workshop on Field Robotics | https://norlab-ulaval.github.io/workshop_field_robotics_icra2024/ |
| Continuum and Soft robotics for medical applications with rising stars on the stage | https://events.femto-st.fr/Workshop-ICRA2024-Continuum-Soft-Robotics/en |
| 3rd Workshop on Future of Construction: Lifelong Learning Robots in Changing Construction Sites | https://construction-robots.github.io/ |
| 6th Workshop on Long-Term Human Motion Prediction | https://motionpredictionicra2024.github.io/ |
| 2nd HERMES Workshop: Multi-Robot Sensing & Perception in Extreme Environments | https://hermes-workshop.com/2024.html |
| Towards Collaborative Partners: Design, Shared Control, and Robot Learning for Physical Human-Robot Interaction | https://sites.google.com/view/icra24-physical-hri |
| Society of Avatar-Symbiosis through Social Field Experiments | https://dil.atr.jp/ITB/en/ws-icra2024/ |
| Agile Robotics: From Perception to Dynamic Action | https://agile-robotics-workshop.github.io/icra2024/ |
| What does Responsible Robotics mean?: Stretching roboticists’ horizons from an academic, government and philosophical perspective | https://tinyurl.com/ResponsibleRobotics |
| Workshop on Ontologies and Standards for Robotics and Automation | https://wosra.github.io/wosra/ |
| Robot Trust for Symbiotic Societies | https://www.trustworthyrobots.eu/rtss-icra/ |
| Applications and Future Directions of Affective Technologies | https://afdat.blogs.rice.edu/ |
| C4SR+: Continuum, Compliant, Cooperative, Cognitive Surgical Robotic Systems in the Embodied AI Era | https://www.ee.cuhk.edu.hk/c4sr |
| Dynamic Duos: Human-Robot Co-Worker Adaptation in Manufacturing | https://www.rocoadapt.eu/ |
| Autonomy in Robotics Surgery: State of the art, technical and regulatory challenges for clinical application | https://metropolis.scienze.univr.it/icra24-workshop-autonomy-in-robotics-surgery/ |
| MAD-Games: Workshop on Multi-Agent Dynamic Games | https://icra2024-madgames.f1tenth.org/ |
| Back to the Future: Robot Learning Going Probabilistic | https://probabilisticrobotics.github.io/ |
| (Re)designing the tree of robotic life: a game of alternative timelines | https://sites.google.com/view/tree-of-robotic-life-icra2024/home?authuser=0 |
| Impulsive motion in soft robotic and microrobotic systems | https://ris-lab.github.io/impulsive/ |
| Agile Movements II: Animal Behavior, Biomechanics, and Robot Devices | https://sites.google.com/view/agilemovementsii/home |
| BIMANUAL MANIPULATION: ON KITCHEN CHALLENGES | https://sites.google.com/view/icra2024-ws-bi-mp/home |
| Exploring Role Allocation in Human-Robot Co-Manipulation | https://sites.google.com/york.ac.uk/icra24-co-manipulation/home-page |
| ProxyTouch: Whole-body Proxy-Tactile Architectures for Industrial and Service Applications | https://sites.google.com/view/icra2024proxytouch/home |
| Debates on the Future of Robotics Research | https://www.roboticsdebates.org/ |
| Bio-inspired robotics and robotics for biology | https://li-lab.de/workshop/ |
| A Future Roadmap for Sensorimotor Skill Learning for Robot Manipulation | https://icra-manipulation-skill.github.io/ |
| Robotics and Sustainability: A Bidirectional Relationship | https://sites.google.com/view/rsicra2024 |
| 2nd Workshop on Mobile Manipulation and Embodied Intelligence (MOMA) Integrating Perception, Learning and Control for Full Autonomy | https://mobile-manipulation.net/moma2024/ |
| Bioinspired, soft and other novel design paradigms for aerial robotics | https://aerial-robotics-workshop-icra2024.com/ |
| Advancing Sustainable Food Systems through Agri-Robotics Innovations | https://www.santannapisa.it/it/icra-2024-workshop-agri-robotics |
| Co-design in Robotics: Theory, Practice, and Challenges | https://www.robotmechanisms.org/activities/icra-2024-codesign |
| Soft Continuum Manipulators: Bottlenecks and Applications | https://softperceptiverobots.it/ |
| Advanced human-robot interfaces based on physiological signals and sensory stimulations | https://www.a-human.unimore.it/ |
| Assistive Systems: Lab to Patient Care | https://sites.google.com/view/assistivesystems-icra-24/home |
| 2nd Robot-Assisted Medical Imaging ICRA-RAMI | https://sites.google.com/view/rami-icra-2024-workshop/home |
| Sustainable Soft Robots: Working with the Environment | http://www.sustainable-soft-robotics.com/ |
| Workshop on Robot Ethics – Ethical, Legal and User Perspectives in Robotics and Automation (WOROBET) | https://www.mn.uio.no/ifi/english/research/groups/robin/events/workshops/workshop-icra2024.html |
Friday 17th May 2024
| 3D Visual Representations for Robot Manipulation | https://3d-manipulation-workshop.github.io/ |
| Advancements in Trajectory Optimization and Model Predictive Control for Legged Systems – 2nd Edition | https://atompc-workshop.github.io/ |
| Robots for Understanding Natural Ecosystems | https://sites.google.com/view/icra-2024-rune-workshop/home |
| Cooking Robotics: Perception and motion planning | https://sites.google.com/view/icra2024cookingrobotics/ |
| Robot Software Architectures (RSA24) | https://rsa24.weebly.com/ |
| Multi-Object Grasping: Progress and Prospects | https://sites.google.com/view/icra2024-multiobjectgrasping/home |
| First Workshop on Vision-Language Models for Navigation and Manipulation | https://vlmnm-workshop.github.io/ |
| Radar in Robotics: Resilience from Signal to Navigation | https://sites.google.com/view/radar-robotics |
| Breaking Swarm Stereotypes | https://hauertlab.com/breaking-swarm-stereotypes-workshop-icra-2024/ |
| Loco-Manipulation: Algorithms, Challenges & Applications | https://sites.google.com/view/loco-manipulation-icra24/home |
| Unconventional Robots: Universal Lessons for Designing Unique Systems | https://sites.google.com/andrew.cmu.edu/unconventionalrobots |
| Humanoid Whole-body Control: From human motion understanding to humanoid locomotion | https://icra-2024-humanoid.github.io/ |
| RoboNerF: Neural Fields in Robotics | https://robonerf.github.io/2024/ |
| Supervised autonomy: how to shape human-robot interaction from the body to the brain | https://sites.google.com/view/hri-workshop-icra2024 |
| Advancing Wearable Devices and Applications through Novel Design, Sensing, Actuation, and AI | https://icra-2024-wearable-workshop.csail.mit.edu/ |
| Nursing Robotics: a new field emerging from the integration between robotics and nursing science | https://zkks.w3.kanazawa-u.ac.jp/ICRA2024/ |
| Speed-dating to long-term relationships: Art-robot Residencies Enabled by Common Language | https://roboticart.org/icra-2024-workshop/ |
| Workshop on Human-aligned Reinforcement Learning for Autonomous Agents and Robots | https://harlworkshop.github.io/ |
| 2nd Workshop on NeuroDesign in Human-Robot Interaction: The making of engaging HRI technology your brain can’t resist | https://neurodesign-in-hri.webflow.io/ |
| Cognition across species: from nature to robotic application | https://bsr.iit.it/icra2024-ws-cognition |
| Expanding Frontiers of Sim2Real: Robotics, biomechanics, plasma physics, chip design, and beyond | https://sites.google.com/view/myosuite/myosymposium/icra24 |
| Human-Robot Companionship for Healthcare and Wellness: Which Form of Companionship for What Type of Care? | https://www.santannapisa.it/en/institute/dirpolis/ethics-tecnology |
| ViTac 2024: Robot Embodiment through Visuo-Tactile Perception | https://shanluo.github.io/ViTacWorkshops/ |
| Accelerating Discovery in Natural Science Laboratories with AI and Robotics | https://sites.google.com/view/icra24-accelerating-discovery |
| Human-Centric Multilateral Teleoperation: Perception, Telecommunication, and Coordination | https://sites.google.com/view/humancentricicra2024 |
| Innovations and Applications of Human Modeling in Physical Human-Robot Interaction | https://sites.google.com/view/icra2024-workshop-human-phri |
| How to Ensure Correct Robot Behaviors? Software Challenges in Formal Methods for Robotics | https://sites.google.com/lehigh.edu/fmr-icra2024 |
| Wearable Intelligence for Healthcare Robotics (WIHR): from Brain Activity to Body Movements | https://icrawearable.github.io/ |
| Anthropomorphic and zoomorphic end-effectors: asset or useless bias? | https://sites.google.com/view/ws-icra-24-bias/home |
| 4th Workshop on Representing and Manipulating Deformable Objects | https://deformable-workshop.github.io/icra2024/ |
| Robotics and Automation in Nuclear Environments | https://ukaeaevents.com/robotics-for-nuclear-environments/ |
| Workshop on Resilient Off-road Autonomy | https://theairlab.org/icra2024_offroad_workshop |
| TRANSLATIONAL RESEARCH IN MEDICAL ROBOTICS From Lab Bench to Clinical Use – How to? | https://translational-medical-robotics.github.io/ |
| Emerging Technologies in Smart Exoskeleton Systems | https://icra-2024-workshop-exos.github.io/ |
| Robots and roboticists in the age of climate change | https://sites.google.com/site/adrienescandehomepage/ICRA2024ClimateChange |
Tutorials
Monday 13th May 2024
| Connected Robotics Platform for ROS Deployment in Real-world Network Settings | https://github.com/5G-ERA/docs/tree/main/Workshops/ICRA24 |
| Tutorial on Ergodic Control | https://ergodiccontrol.github.io/ |
Friday 17th May 2024
| Riemann and Gauss meet Asimov: 2nd Tutorial on Geometric Methods in Robot Learning, Optimization and Control | https://sites.google.com/view/icra-2024-tutorial-geometry/ |
| Cloud and Fog Robotics: A Hands-on Tutorial with ROS2 and FogROS2 | https://sites.google.com/view/icra-24-cloud-robotics/home |
| How to manage fleets of robots with open source software | https://www.theconstructsim.com/icra-tutorial-how-to-manage-fleets-of-robots-with-open-source-software/ |
| Choreographic swarms: From scripting to emergent expressive behaviors to CONNECT humans and robots | https://roboticart.org/icra2024/ |